Time
What do we use clocks for?
- “scheduling”: marking points in time
“this class starts at 3:20pm PDT”
“this item in cache expires on May 21 at 8pm”
“this error message in errors.txt has a timestamp of X”
- durations/intervals
this class is 95 minutes long
this request times out in 10 seconds
Computers have 2 kinds of physical clocks:
- time of day clock
tells you what time of day it is
can be synchronized between machines (e.g. NTP)
can jump forward/backward (e.g. moving between time zones, DST, leap seconds)
not so great for intervals/durations
ok for points in time, but only ok
- monotonic clock
only goes forward
not comparable between machines (e.g. time since boot)
cannot mark specific points in time
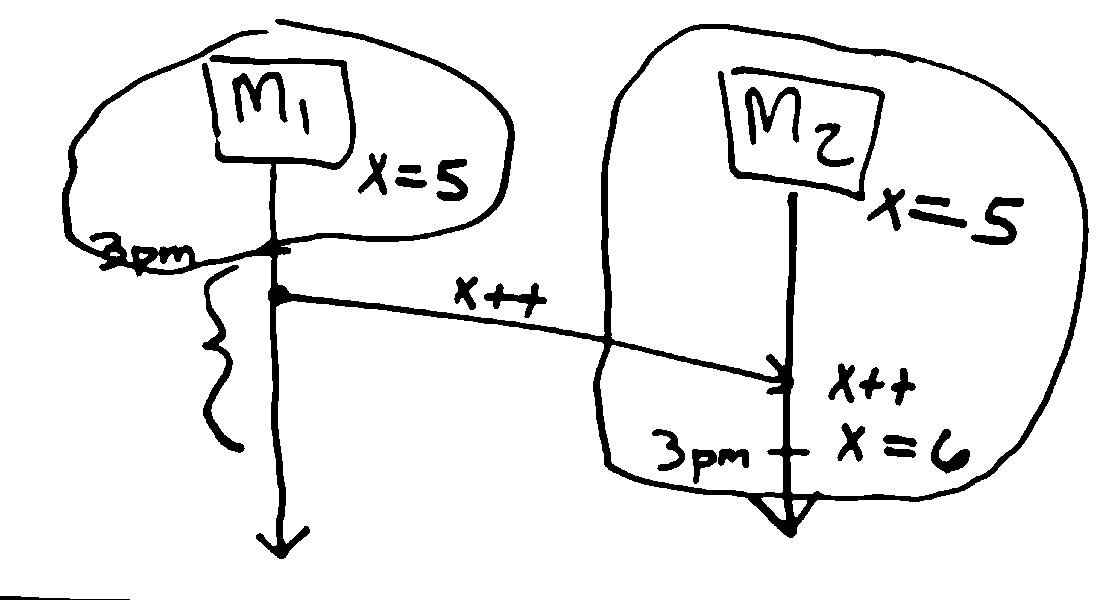
Consider the following scenario, where two computers take snapshots of their state at a given time:
Logical Clocks
Logical clocks only measure the order of events.
e.g. A -> B: “A happened before B”
This tells us some things about causality:
A might have caused B
B could not have caused A
Lamport Diagrams
aka spacetime diagrams
Each process is represented by a line. It has a discrete beginning and goes on forever.
Events are represented by dots on the line.
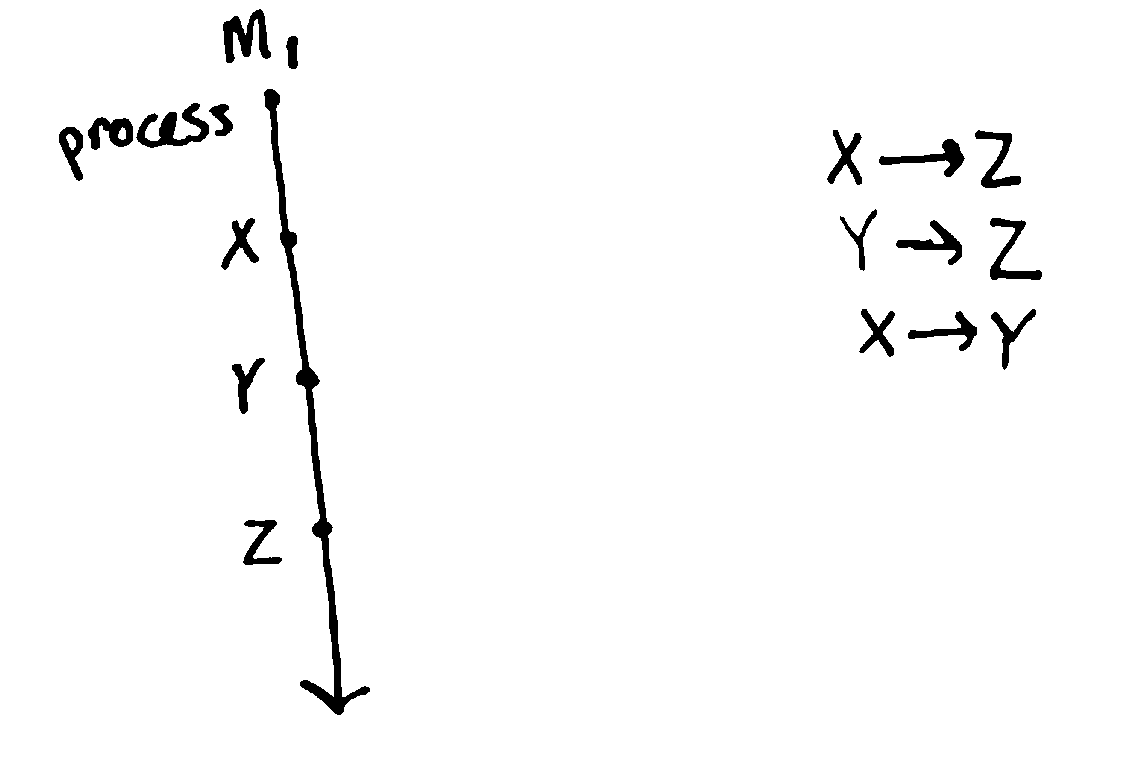
You can represent systems of machines and messages with lines and arrows:
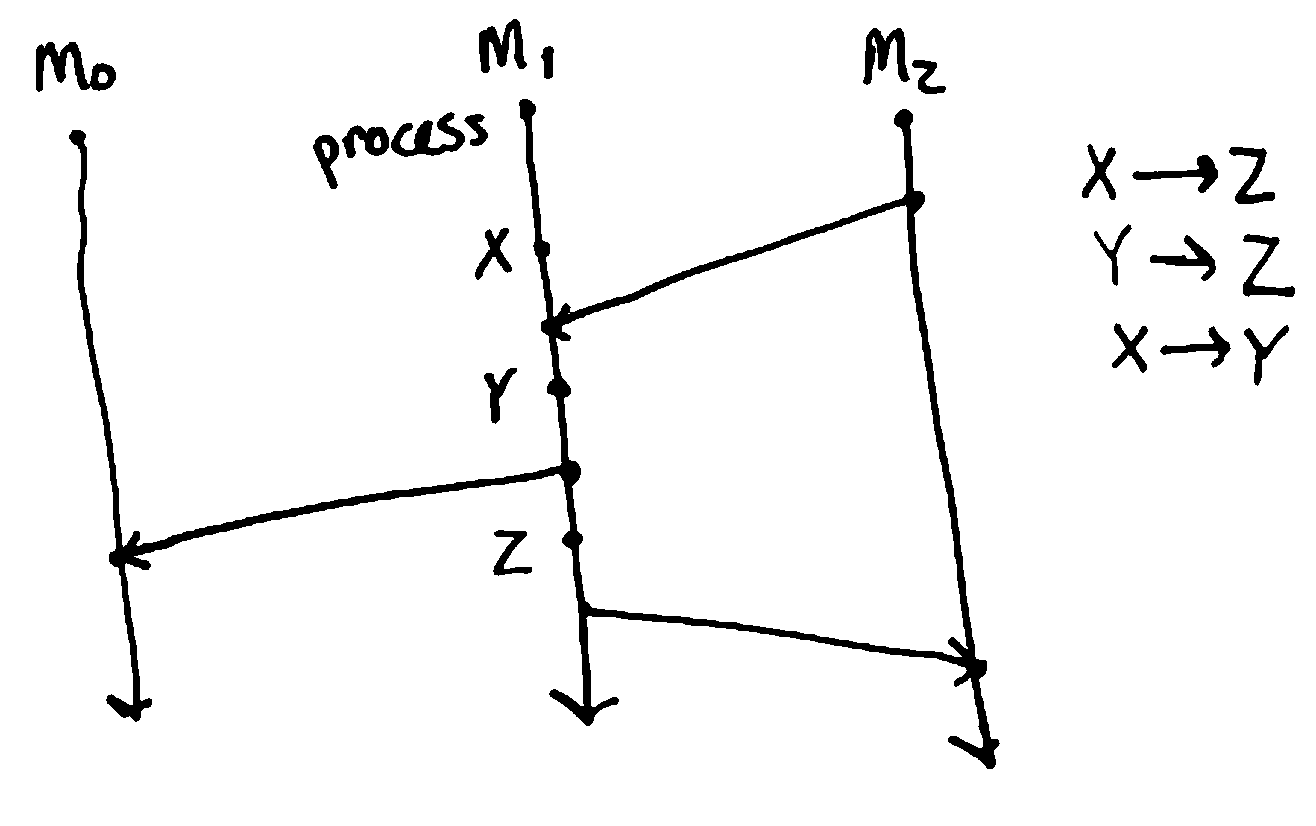
Given events A and B, we say \(A \to B\) if:
A and B occur on the same process with A before B
A is a send event and B is the corresponding receive event
\(A\to C\) and \(C \to B\)
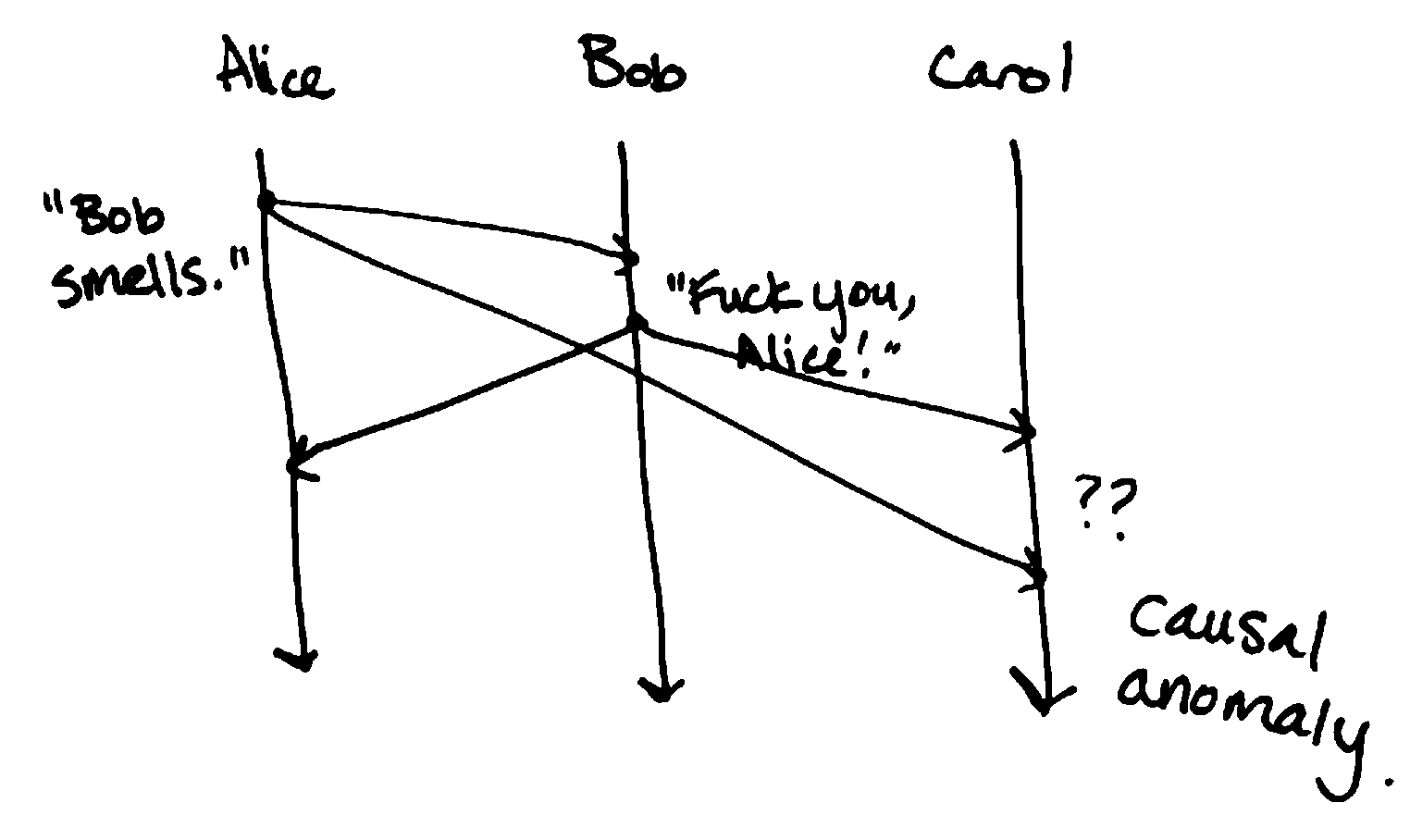
If we can’t be sure that given a pair of events, one happens before the other, they are concurrent:
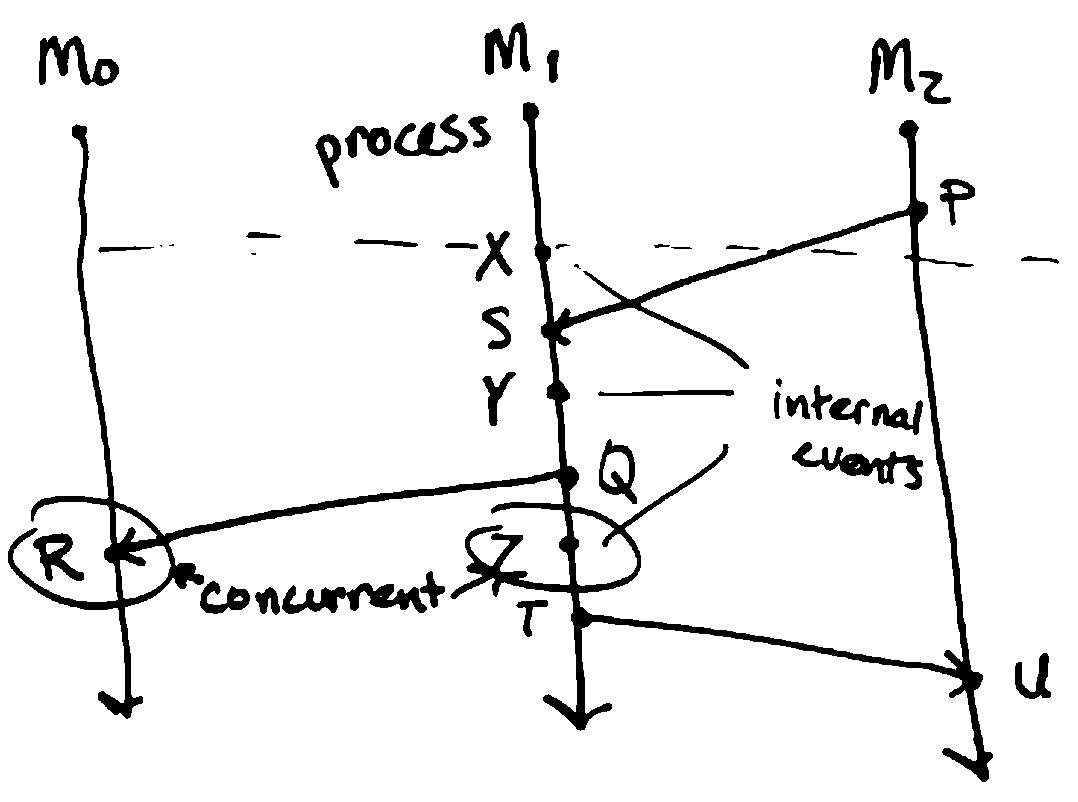
\(R || T\)
We can use logical clocks to counteract causal anomalies like this, caused by unbounded latency:
Network Models
- synchronous network
a network where there exists an n such that no message takes longer than n units of time to be delivered.
We won’t talk about this type of network.
- asynchronous network
a network with unbounded latency, i.e. there does not exist such n such that no message takes longer than n units of time to be delivered.
State and Events
- state
something that a given machine knows - e.g. contents of memory/disk
represented by a dot on a Lamport diagram
We can determine the current state by looking at the sequence of events leading up to it:

However, we can’t do the opposite.
Partial Order
Let’s take a brief detour to talk about partial orders.
Partial orders are:
a set S
- a binary relation, often written ≤, that lets you compare elements of S, and has the following properties:
reflexive: \(\forall a \in S, a \leq a\)
antisymmetry: \(\forall a, b \in S, a \leq b \land b \leq a \implies a = b\)
transitivity: \(\forall a, b, c \in S, a \leq b \land b \leq c \implies a \leq c\)
The “happens-before” relation is not a partial order! Considering a set of events, transivity holds and antisymmetry holds (vacuously), but events are not reflexive (it is, however, an irreflexive partial order)!
Note
An actual partial order is set containment:
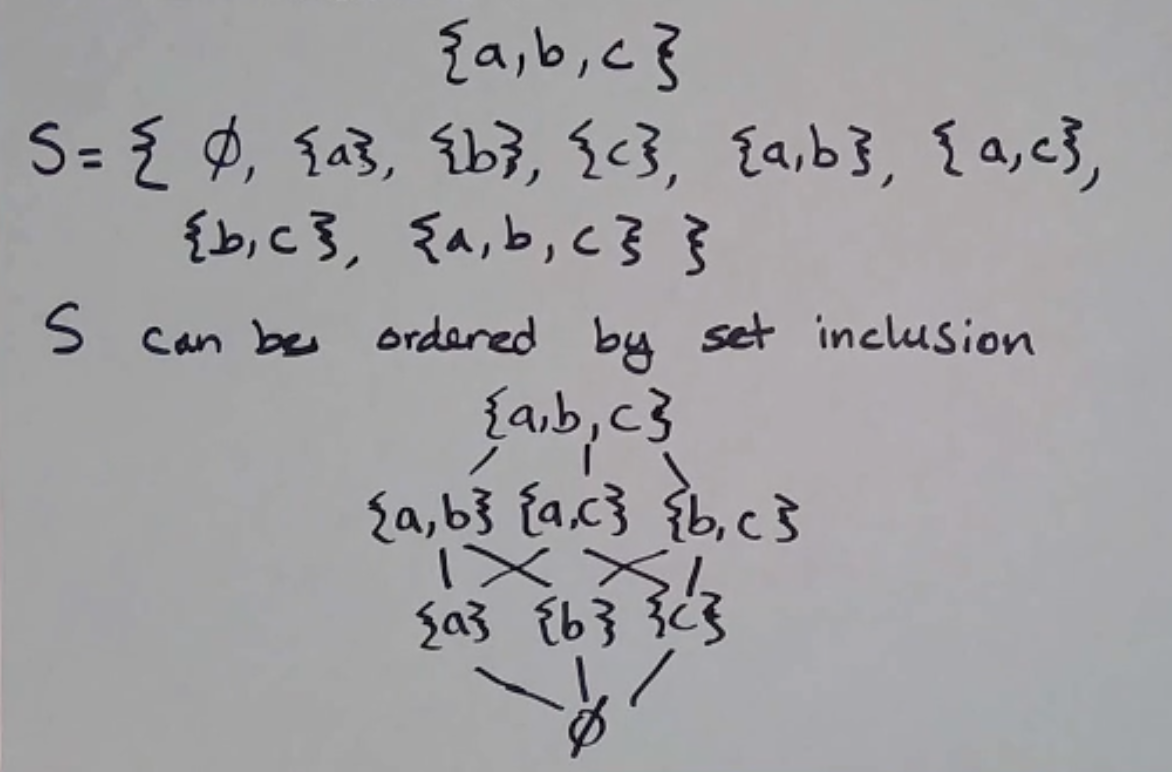
Note that in a partial order, some elements of S may not be comparable (in the example above, {A} and {B} are not related). If all elements in S are comparable, it’s called a total order (e.g. natural numbers).
Lamport Clocks
a type of logical clock
\(LC(A)\) - the Lamport clock of event A.
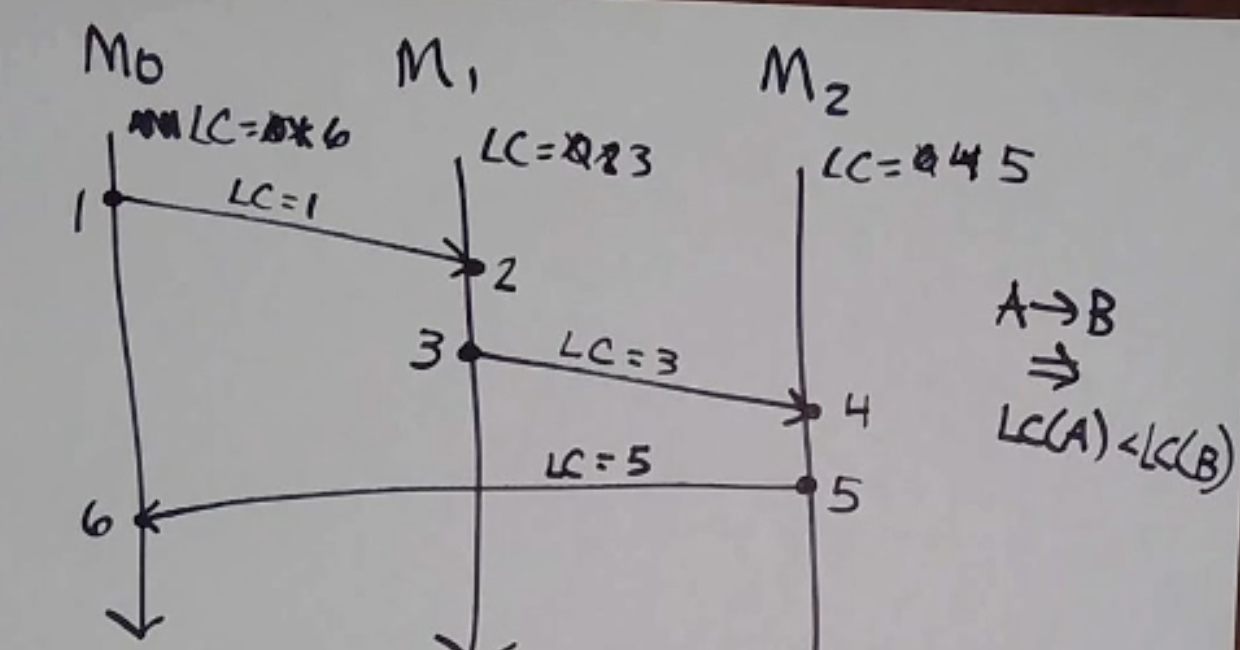
- clock condition
if \(A \to B\), then \(LC(A) < LC(B)\).
How do we assign Lamport clocks to events?
every process keeps a counter initialized to 0
on every event on a process, increment process’ counter by 1
when you send a message, include the current counter with the message
when you receive a message, set counter to max(local, recv) + 1
Important
The converse is not necessarily true (i.e. \(LC(A) < LC(B) \lnot \implies A \to B\)).

Even though \(LC(A) < LC(B)\), there is no path from A to B - so there is no guarantee that \(A \to B\).
Specifically, while Lamport clocks are consistent with causality, they do not characterize causaility.
We can use it for it’s contrapositive, though! (\(\lnot LC(A) < LC(B) \implies \lnot A \to B\) - either \(B \to A\) or \(A || B\))
Vector Clocks
While Lamport clocks don’t character causaility, vector clocks do!
\(A \to B \iff VC(A) < VC(B)\)
Every process keeps a vector of integers initialized to 0 (size = # of processes)
On every event (including receive), a process increments its own position in its vector
When sending a message, a process includes its current vector clock
When receiving a message, a process updates its vector clock to max(local, recv) (element-wise) and increments its position
Note
max() is element-wise: e.g. max([1, 12, 4], [7, 0, 2]) = [7, 12, 4]

Now, say we wanted to find all events that happened before some event A (its causal history):

Notice that all vector clocks of events in A’s causal history are less than or equal to A’s VC! (Similarly, all events that happen after A have VCs greater than or equal to A’s VC.)
Any events that do not satisfy either of these are concurrent with/causally independent of A.
(In the example above, some examples are [0, 3, 3] and [3, 3, 3]).